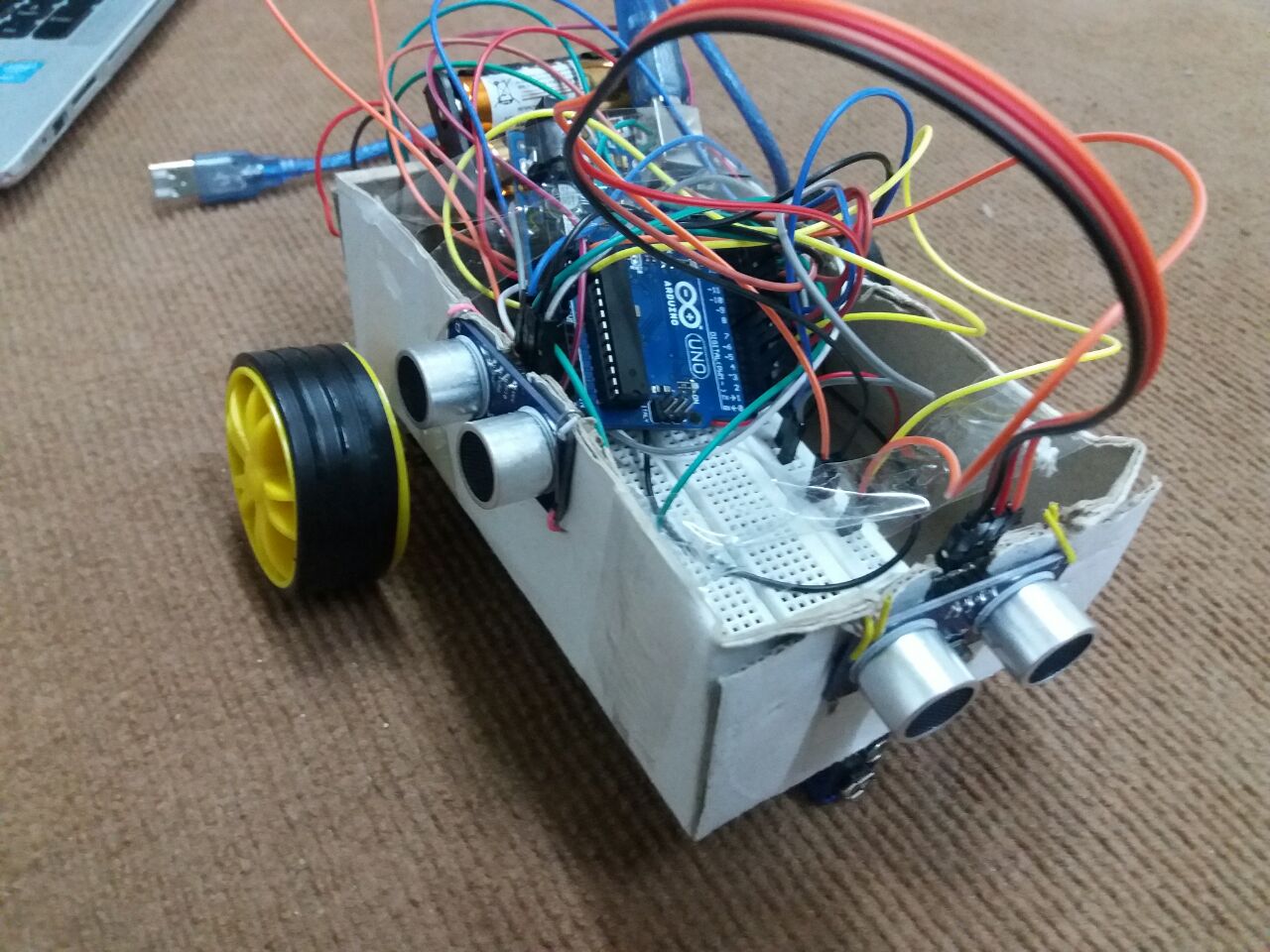
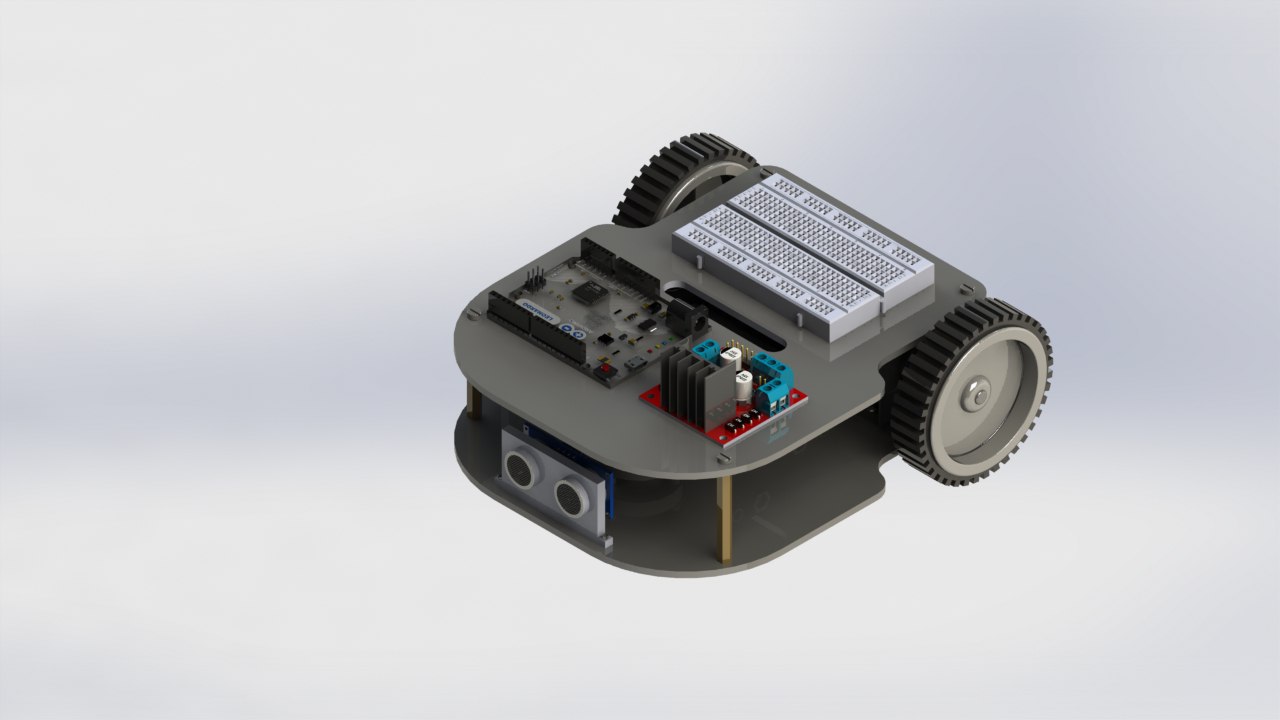
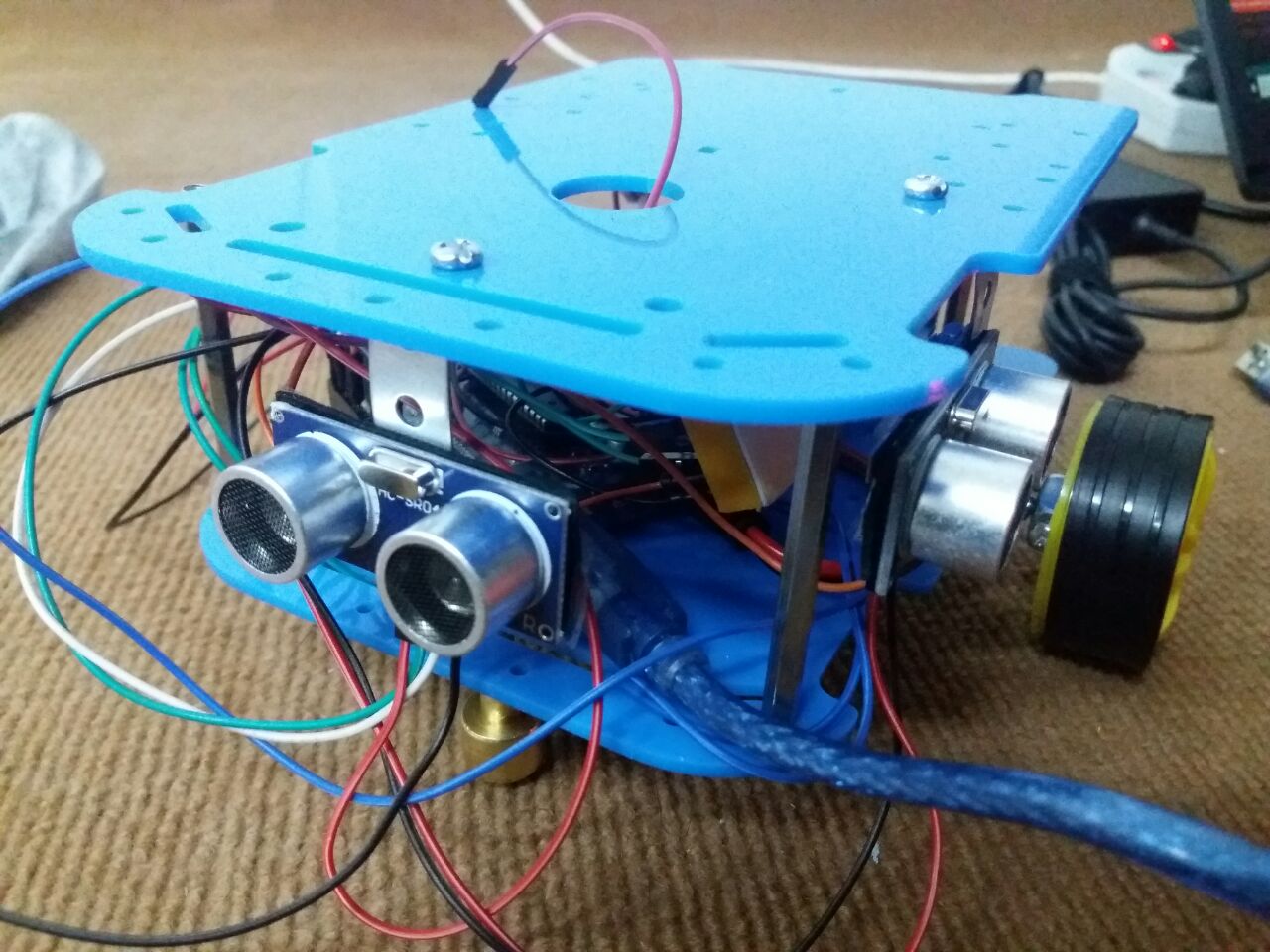
We worked on the Maze-Navigating Robot Design project from October 2018 to December 2018 as part of my Mechatronics course during my Bachelor's degree. This project focused on creating a robot capable of autonomously navigating through a maze.
Key Contributions:
{kind=link}
{kind=link}
{kind=link}