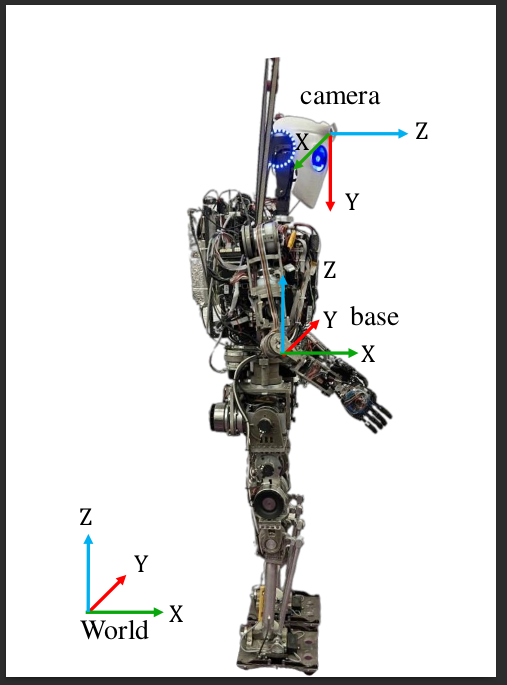
I worked on the Simultaneous Localization and Mapping (SLAM) on Surena-V humanoid robot project from October 2020 to September 2022. This project was also part of my MSc thesis, and more information is available in the paper titled Comparative Evaluation of RGB-D SLAM Methods for Humanoid Robot Localization and Mapping.
Key Contributions:
This experience significantly contributed to my understanding of robotics and the complexities involved in localization and mapping technologies.
{kind=link}
{kind=link}